Konservative Methoden¶
Das autonome Anfangswertproblem
und
besitzt die analytische Lösung
Es gilt
[1]:
import numpy as np
import matplotlib.pyplot as plt
[2]:
from odeSolvers import classicRungeKutta, implicitMidpoint, implicitEuler
In Vektor-Notation folgt für das Anfangswertproblem
mit
Für die Anwendung impliziter Methoden benötigen wir die Jacobi-Matrix von \(\mathbf{f}\) bezüglich \((x,y)^T\):
[3]:
# rechte Seite f(t,(x,y)) des Anfangswertproblems
def f(x,y):
return np.array([y[1],-y[0]])
# Jacobi-Matrix der rechten Seite bezüglich (x,y)
def df(x,y):
return np.array([[0.,1.],[-1.,0.]])
Der Anfangswert ist gegeben durch \((0,1)^T\).
[4]:
y0 = np.array([0.,1.])
[5]:
h = 0.1
(tIE,yIE) = implicitEuler(40, h, y0, f, df)
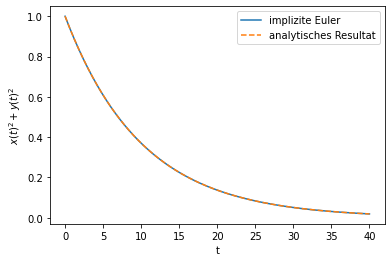
Für das implizite Euler Verfahren haben wir
erhalten. Damit folgt, dass das Verfahren die Energie nicht erhält. Man spricht hier auch von „numerischer“ Reibung.
[6]:
plt.plot(tIE,yIE[:,0]**2+yIE[:,1]**2, label='implizite Euler')
plt.plot(tIE,1/(1+h**2)**np.arange(tIE.shape[0]),'--', label='analytisches Resultat')
plt.legend()
plt.xlabel('t')
plt.ylabel(r'$x(t)^2+y(t)^2$')
plt.show()
[7]:
(tIM,yIM) = implicitMidpoint(400, 1, y0, f, df)
(tRK,yRK) = classicRungeKutta(400, 1, y0, f)
(tIM2,yIM2) = implicitMidpoint(400, .5, y0, f, df)
(tRK2,yRK2) = classicRungeKutta(400, .5, y0, f)
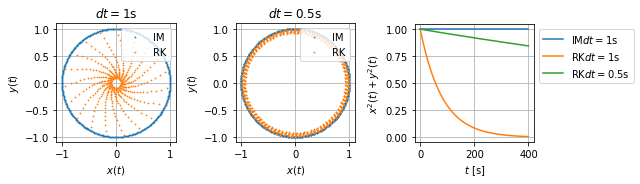
Die numerische Lösung im Phasendiagram dargestellt liefert uns für die beiden Lösungen den folgenden Graphen:
[8]:
from odeSolversVisualization import myplot
[9]:
myplot(tIM,yIM,tRK,yRK,tIM2,yIM2,tRK2,yRK2,r'$dt =1$s',r'$dt =0.5$s')
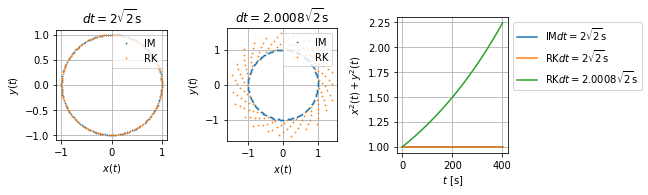
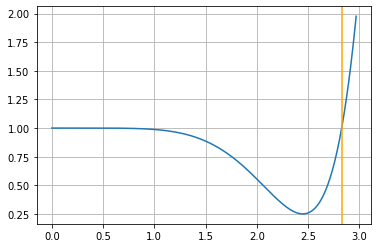
Für das Testproblem kann \(x_{k+1}^2+y_{k+1}^2\) für das Runge-Kutta 4. Ordnung explizit berechnet werden (vgl. Skript). Es gilt
Für \(h = 2\sqrt{2}\) gilt \(\kappa(h) = 1\) und für \(h>2\sqrt{2}\) ist das Verfahren instabil.
[10]:
h = np.linspace(0,2.1*np.sqrt(2),400)
plt.plot(h,np.abs(1-h**6/72+h**8/576))
plt.axvline(2*np.sqrt(2),c='orange')
plt.grid()
[11]:
(tIM3,yIM3) = implicitMidpoint(400, 2*np.sqrt(2), y0, f, df)
(tRK3,yRK3) = classicRungeKutta(400, 2*np.sqrt(2), y0, f)
[12]:
(tIM4,yIM4) = implicitMidpoint(400, 2.0008*np.sqrt(2), y0, f, df)
(tRK4,yRK4) = classicRungeKutta(400, 2.0008*np.sqrt(2), y0, f)
[13]:
myplot(tIM3,yIM3,tRK3,yRK3,tIM4,yIM4,tRK4,yRK4,r'$dt =2\sqrt{2}$s',r'$dt =2.0008\sqrt{2}$s')