5.2. Sobolevräume#
Mit den Sobolevräumen kommt nun die Ableitung von Elemente aus dem \(L_2(\Omega)\) ins Spiel. Wir definieren den Sobolevraum \(H^k(\Omega)\) wie folgt
Definition 5.3 (Sobolevraum \(H^k(\Omega)\))
Unter dem Sovolevraum \(H^k(\Omega)\) versteht man den linearen Raum aller linearen Funktionale \(F\) auf \(C_0^\infty(\Omega)\), für die \(F\) und sämtliche Ableitungen \(D^pF\) der Ordnung \(|p|\le m\) zu \(L_2(\Omega)\) gehören:
Mit \(x = (x_1, \ldots, x_n)^T \in \mathbb{R}^n\), dem Multiindex \(p = (p_1, \ldots, p_n)\), \(p_i\in \mathbb{N}_0\) für \(i=1,\ldots, n\) und
sowie \(|p| = p_1 + \ldots + p_n\).
Nicht klar ist an dieser Stelle, was \(D^p F\) zu bedeuten hat, da \(F\) ein beschränktes lineares Funktional ist. Der klassische Ableitungsbegriff genügt nicht der in der Definition benutzten Ableitung, da dieser für Funktionale verallgemeinert werden muss.
Betrachten wir das Ganze mit Hilfe eines eindimensionalen Gebietes \(\Omega = [0,1]\) und für Funktionale \(F_u \in L_2([0,1])\), welche durch Funktionen \(u\in C^1([0,1])\) induziert sind:
Die Ableitung \(\frac{\partial}{\partial x} F_u\) definieren wir wie folgt:
Mit der Definition und partieller Integration erhalten wir
Wir erhalten somit
Oder für mehrdimensionale Gebiete \(\Omega\)
Damit können wir eine verallgemeinerte Ableitung definieren, welche auch auf Funktionen \(u(x)\), welche selber nicht im klassischen Sinne differenzierbar sind, anwendbar ist:
Definition 5.4 (Verallgemeinerte Ableitung (generalized derivative))
Für \(u\in L_2(\Omega)\) definieren wir \(g \in L_2(\Omega)\) als die verallgemeinerte Ableitung \(D^pu\) von \(u\) wobei
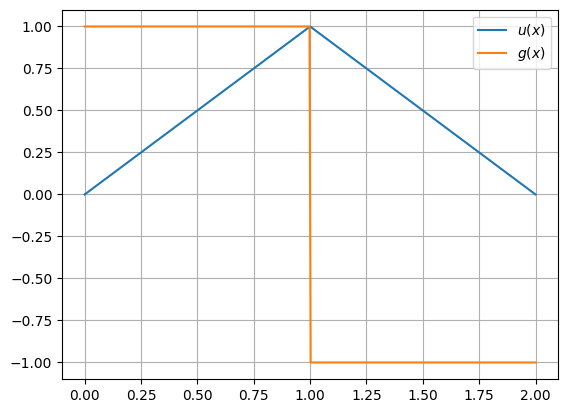
Beispiel: Ein Beispiel einer Funktion die schwach, aber nicht klassisch differenzierbar ist, ist \(u:[0,2] \to \mathbb{R}\) mit
Die schwache Ableitung \(g(x) := D^1u(x)\) ist die stückweise definierte Ableitung
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
xp = np.linspace(0,2,400)
yp = np.zeros_like(xp)
yp[xp<1] = xp[xp<1]
yp[1<=xp] = 2-xp[1<=xp]
dyp = np.zeros_like(xp)
dyp[xp<1] = 1
dyp[1<=xp] = -1
plt.plot(xp,yp,label=r'$u(x)$')
plt.plot(xp,dyp,label=r'$g(x)$')
plt.legend()
plt.grid()
plt.show()
Für alle \(v\in C_0^\infty[0,1]\) gilt
Eine äquivalente oft benutzte Definition der Sobolevräume (leicht allgemeinere) baut auf den lokal integrierbaren Funktionen auf \(\Omega\) auf, gegeben durch
Der Raum \(L_1^{\text{loc}}\) beinhaltet Funktionen, welche sich sehr schlecht in der Nähe des Randes \(\partial\Omega\) verhalten können.
Beispiele:
\(e^{e^{1/x}}\) ist in \(L_1^{\text{loc}}(0,1)\).
Ist \(\Omega\) unbeschränkt, dann ist die Funktion 1 in \(L_1^{\text{loc}}(\Omega)\), aber nicht in \(L_1\). Ist zum Beispiel \(\Omega = \mathbb{R}^n\), dann gilt
Definition 5.5 (Sobolev Räume \(W_p^k(\Omega)\))
Sei \(k\in\mathbb{N}_0\) und \(1 \le p < \infty\), dann definieren wir die Sobolev Normen mit
und die Sobolev Räume mit
Ohne Beiweis gilt der Satz
Theorem 5.2
Die Sobolev Räume \(W_p^k(\Omega)\) sind Banach Räume. Der Sobolev Raum \(W_2^k(\Omega) = H^k(\Omega)\) ist ein Hilbertraum.
Beispiel: Wir werden primär den Sobolev Raum \(W_2^1(\Omega) = H^1(\Omega)\) benutzen. Hier gilt für die Norm
und das Skalarprodukt
Siehe auch